DIY RC Drone Quadrocopter 풀 세트 RTF X4M380L 프레임 키트, APM 2.8 비행 제어 모터 ESC 소품 AT10 송신기 11.1V 3300Mah 25C 배터리
조립되지 않은 구매자는 스스로 조립해야합니다.
패키지 포함:
X4M380L 유리 섬유 프레임 * 1
시계 방향 브러시리스 모터 * 2
시계 반대 방향 브러시리스 모터 * 2
30A 브러시리스 ESC 속도 컨트롤러 * 4
9443 프로펠러 * 2
KK 연결 보드 * 1
APM2.8 비행 제어 * 1
나침반 포함 6M GPS * 1
3.5mm 총알 커넥터 * 12
20cm 후크 및 루프 고정 테이프, * 1
T 플러그 수 커넥터 실리콘 와이어 * 1
서보 수신기 연장 리드 와이어 케이블 5 개 10cm, * 1
GPS 접이식 안테나 마운트 홀더 * 1
11.1V 3300Mah 25C Lipo 배터리 * 1
Radiolink AT10 송신기 * 1
IMAX RC B3 Pro 컴팩트 밸런스 충전기 * 1







전에 구성 APM,
먼저 모든 것을 함께 연결해야합니다.
이 가이드는 apm에 연결하는 데 필요한 모든 케이블과 부품을 보여줍니다.
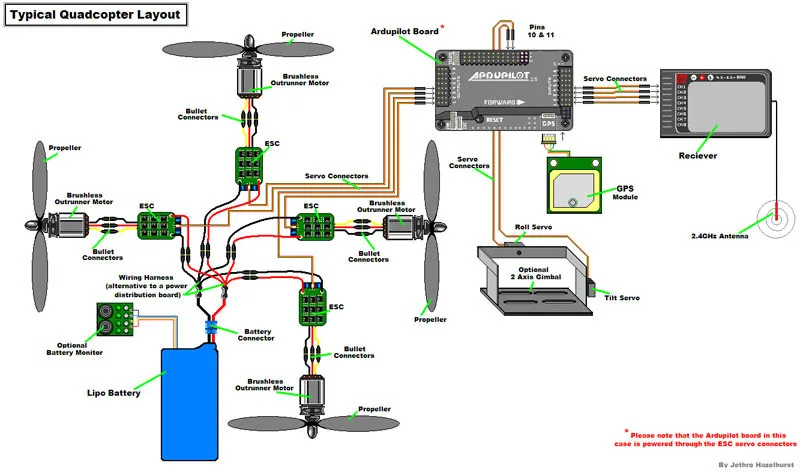
전형적인 Quadcopter 레이아웃
아래 그림은 (일반) 설치를 강조합니다. 카메라 짐벌과 배터리 모니터를 포함한 옵션 장비가 포함되어 있으며 여러 멀티콥터와 일반적인 배전 보드가 아닌 ESC 유선 "Y" 전원 연결을 사용합니다.
1. 모터와 RC 기어 연결
참고: 아래의 지침은 PWM 출력의 일반 RC 수신기 용입니다 (채널당 케이블 1 개). "PPM" 수신기를 사용하는 경우 (하나의 케이블은 모든 채널을 운반) 지침을 따르십시오.
Arducopter를 구성하기 전에 먼저 모든 것을 함께 연결해야합니다. 이것은 아주 쉽습니다. 당신은 연결 RC 수신기 입력 측면. Arducopter 키트에 포함 된 케이블을 사용하거나 다른 프레임을 사용하는 경우 점퍼 케이블 또는 암-암 서보 케이블을 사용할 수 있습니다.
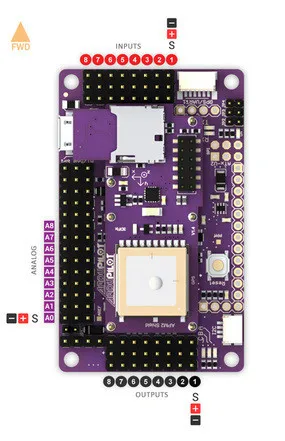
Ardupilot Mega v2 보드의 연결 개요
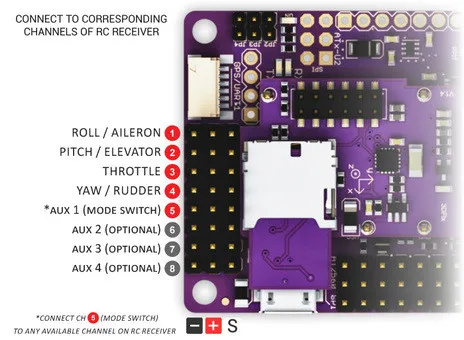
RC 수신기와 Ardupilot 메가 v2 보드 사이의 연결
암-암 서보 케이블을 사용하는 경우 각 커넥터의 접지 (검정색) 측면이 보드의 외부에 있어야합니다. 신호 (흰색/주황색) 는 아래와 같이 내부에 있어야합니다.
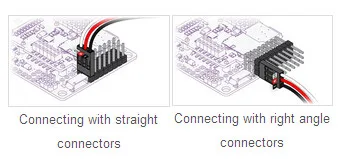
Arducopter 키트에 포함 된 멀티 핀 커넥터를 사용하는 경우 아래와 같이 연결하십시오.

참고, 당신의 ESC, 커넥터 해야 연결할 the 출력 사이드, 당신이 단지 전력 당신의 ESC. 이것은 ESC 중 하나를 제외한 빨간색 와이어를 절단하거나 특수 어댑터를 사용하여 모래 언덕이 될 수 있습니다.
2. ArduCopter 모터 연결
Pdb와 함께 Arducopter 키트를 사용하는 경우 다시 한 번, 그런 다음 모터가 이전 단계에 연결된 케이블로 올바른 핀에 할당되므로 모든 것을 제대로 납땜했다면 걱정할 필요가 없습니다. 그러나 모터가 올바른 방향으로 회전하고 있는지 확인하는 것이 필요합니다. 아래 이미지는 올바른 모터 방향으로 가능한 arducopter 구성을 보여줍니다.

빠른 팁: 모터가 올바른 방향으로 회전하지 않을 경우 ESC-모터 와이어 두 개의 위치를 전환하기 만하면됩니다.

선택할 수있는 두 가지 색상, 사전에 선호하는 것을 알려주십시오. 그렇지 않으면 재고에 따라 배송 할 것입니다. 감사합니다.
특징:
헬리콥터, 비행기 및 슬라이더 3 가지 유형의 비행 기계와 5 가지 모델을 포함한 다중 기능 원격 제어 시스템, 거의 모든 인기 모델을 커버하면이 라디오로 모든 모델을 비행 할 수 있습니다.
3.5 인치 컬러풀 스크린 320 × 480 해상도, 선명한 디스플레이 메뉴 및 그래프.
큰 제어 거리: 지상에서 1.1km, 하늘에서 2km.
확장 피드백 모듈, 사용자는 실시간으로 비행기 세부 정보를 얻을 수 있습니다.
매우 명확하고 정확하게 출력 결과를 만듭니다.
빠른 응답 시간은 작동에 3ms, 다른 송신기 20ms, 심지어 10 개 채널도 느낄 수 있습니다.
높은 채널 해상도는 4096,0 에 도달합니다. 해상도 당 25us 는 모든 서보를 조용하게 유지합니다.
강력한 점프 방지, DSSS (직접 시퀀스 확산 스펙트럼) 기술.
믿을 수 없는 가격, 고품질 저녁 bland, 더 정확하게, 빠른 반응, 높은 해상도, 하나와 유일한 점프 방지 DSSS 기술. 정말 그것을 가질 가치가 있습니다.
기술적인 모수:
1. 치수: 18 × 9.5 × 22cm;
2. 무게: 0.95kg;
3. 주파수: 2.4GHz ISM 대역 (2400MHz ~ 2485MHz)
4. 변조 모드: QSPK;
5. 채널 대역폭: 5.0MHz;
6. 확산 스펙트럼: DSSS;
7. 인접한 채널 거부:>38dBM;
8. 송신기 전력: <100mW(PCB 테스트),
<20dBm(3 m 공기 테스트)
9. 작동 전압: 8.6 ~ 15V;
10. 작동 전류:<95mA;
11. 제어 거리: 지면 800 m;
12. 채널: 10 채널, 8 ~ 10 채널 사용자 정의 가능;
13. 호환 모델: 120 도 및 90 도 스와시 플레이트 헬리콥터, 모든 고정 날개와 글라이더, 5 개의 비행 모델 포함
14. 시뮬레이터 모델: 시뮬레이터 모델 아래에서 송신기 동작 끄기, 절전 모델로 변경;
15. 스크린: 16 다채로운 스크린, 크기 78 × 52mm,320*480 픽셀.
































 배송기간
배송기간