DIY RC 드론 4 축 FPV S600 프레임 키트 APM 2.8 없음 나침반 Flysky FS-i6 TX 배터리 충전기 700KV 모터 40A ESC XT60
패키지 목록:
S600 수퍼 하드 암 4 축 랙 쿼드 코터 프레임 키트 (랜딩 기어 포함) 스키드 F450 프레임 업그레이드 됨 * 1
JMT 40A 브러시리스 ESC 속도 컨트롤러 * 4
HYD 3508 700KV 198W 디스크 모터 * 4
15x5.5 3K 탄소 섬유 프로펠러 CW CCW 1555 CF Prop * 2 쌍
APM2.8 나침반 비행 컨트롤러 보드 구부러진 핀 케이스 * 1
NEO-7M 7M GPS 모듈 나침반 * 1
CNC GPS 간섭 방지 안테나 마운트 홀더 스텐트 케이스 * 1
5pcs 10cm 서보 수신기 연장 리드 와이어 케이블 M/M * 1
두꺼운 금 도금 3.5mm 총알 커넥터 (바나나 플러그) * 12
후크 및 루프 고정 테이프 * 1
Flysky FS-i6 6CH 2.4G AFHDS 2A LCD 송신기 iA6 수신기 * 1
IMAX RC B3 Pro 컴팩트 밸런스 충전기 * 1
JMT 11.1V 4400MAH 30C 3S1P T 플러그 배터리 * 1
프레임 명세:
축거: 600mm
삼각대 높이: 250mm
최대 가능 패들:15 인치
무게:860g
위와 더 낮은 중심 판 중간 고도:36mm
APM 묘사:
----보호 케이스그러나 완충기!세부 연결 및 프로그래밍을 위해 직접 저에게 연락하십시오.
크기:70*45*13.5
무게: 28G
APM 오픈 소스 비행 제어, 당신은 APM 잘 개별 능력에 따라 재생할 수 있습니다. 플레이어는 모 놀리 식 집적 회로, c-언어, 전기, 기계적 지식에 대한 기본적인 이해의 능력이 있어야하며 정신 용량, 금융 및 자재 자원, 에너지 지원의 어느 정도 필요합니다. 준비되지 않은 경우 먼저 입문 정보를 준비하는 것이 좋습니다.
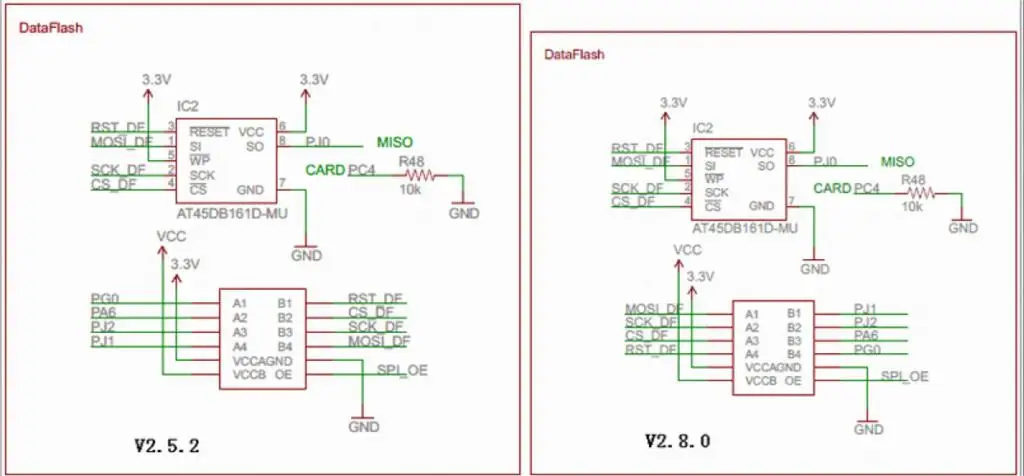
소개:
V2.52 버전 이전 1.0mm 6P SM06B GPS 인터페이스를 제거하여 DF13-4P 나침반 외부 I2C 인터페이스로 변경되어 나침반 외부 인터페이스로 DF13-5P GPS 인터페이스를 놓습니다. 외부 나침반을 가진 연결 gps에 더 편리한.
다시 보드 자유롭게 구성 기능 출력, UART0,UART2,I2C, osd의 패드를 통해 사용자 자체에 의해 사용할 수 있는 다목적 MUX 인터페이스에 V2.52 I2C 인터페이스를 대체, 데이터 전송과 osd를 모두 사용하려는 경우 2.52 버전을 피하는 OSD 인터페이스를 defaults, 당신은 인터페이스 프로그램을 분리 Y 라인을 사용해야합니다. 데이터 전송의 간섭을 피하기 위해 더 효과적인 절연 저항 때문에 데이터 전송과 함께 사용할 때 향상된 OSD 인터페이스.
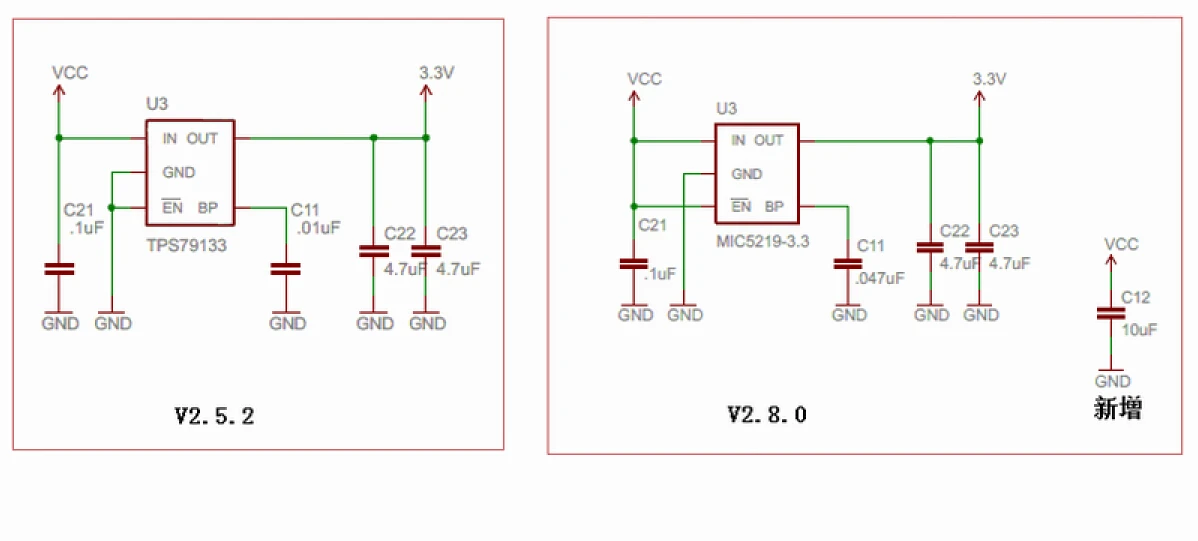
새로운 V2.8.0 사용 미국 semi-LP2985-3.3, 압력 저항 최대 16V, 신뢰성 증가, 전압 문제로 인해 나쁜 자이로 건강의 확률을 감소.
특징:
Arduino 호환!
-연결관을 수직으로 붙이기를 위한 최고 입장 핀으로 주문될 수 있습니다, 또는 옆 입장 핀으로 당신의 연결관을 수평으로 미끄러지기 위하여
-고성능 기압계와 함께 3 축 자이로, 가속도계 및 자력계를 포함
-자동 데이터 로깅 용 온보드 4 메가 바이트 데이터 플래시 칩
-선택적인 떨어져 널 GPS, 나침반을 가진 uBlox LEA-6H 단위.
-Invensense의 6 DoF 가속도계/자이로 MPU-6000 사용하는 최초의 오픈 소스 자동 조종 장치 시스템 중 하나.
-측정 특산에서 MS5611-01BA03 격상된 기압 감지기.
-Atmel의 ATMEGA2560 및 ATMEGA32U-2 칩 처리 및 usb 기능 각각.
1. 데이터 전송 포트
2. 아날로그 감지기 항구
3. autostability 짐벌 출력
4. ATMEGA2560 SPI 온라인 프로그래밍 포트 (광학 유량 센서에 유용합니다)
5. USB 포트
6. 원격 제어 입력
7. 기능 선택 점퍼
8. GPS 포트
9. 12C 외부 나침반 포트
10. ATMEGA32U2 SPI 온라인 프로그래밍 포트
11. 다기능 구성 가능한 MUX 포트 (osd는 고장 출력입니다)
12. 전류 전압 포트
13. ESC 전원 공급 장치 선택 점퍼
14. ESC 출력 포트

































 배송기간
배송기간