Pixhawk PX4 자동 파일럿 PIX 2.4.8 32 비트 비행 컨트롤러
특징:
1. 진보된 32 조금 팔 CortexM4 고성능 가공업자는, NuttX RTOS 순간 운영 체계를 달릴 수 있습니다;
2. 14 PWM/서보 출력;
3. 버스 인터페이스 (UART, I2C, SPI, CAN);
4. 통합 지원 힘 및 지원 관제사는 실패합니다, 1 차적인 관제사는 백업 통제에 실패합니다 안전합니다;
5. 자동 및 수동 모드 제공;
6. 중복 전원 입력 및 failover 제공;
7. 여러 가지 빛깔의 LED 조명;
8. Provide 다 음색 초인종 공용영역
9. 마이크로 SD 기록 비행 자료;
명세:
마이크로 프로세서
1.32 2 MB 플래시 STM32F427 Cortex M4, 하드웨어 부동 점 처리 장치 포함
2. 주파수: 168MHZ, 256K RAM
3.32 STM32F103 백업 coprocessor
센서
1.L3GD20 3 축 디지털 자이로 16
2.LSM303D 3 축 가속도계 14/자력계
3.MPU6000 6 축 가속도계/자력계
4.MS5607 정밀 기압계
인터페이스
1 .5 높은 전압 호환 UART 1, 2 하드웨어 흐름 제어
2. 2 수
3.Spektrum DSM / DSM2 / DSM-X 위성 수신기 호환성 입력
4.Futaba SBUS 호환성 입력 및 산출
5.PPM 신호 입력
6.RSSI (PWM 또는 전압) 입력
7.I2C
8.SPI
9.3.3 및 6.6VADC 입력
10. 외부 마이크로 USB 공용영역
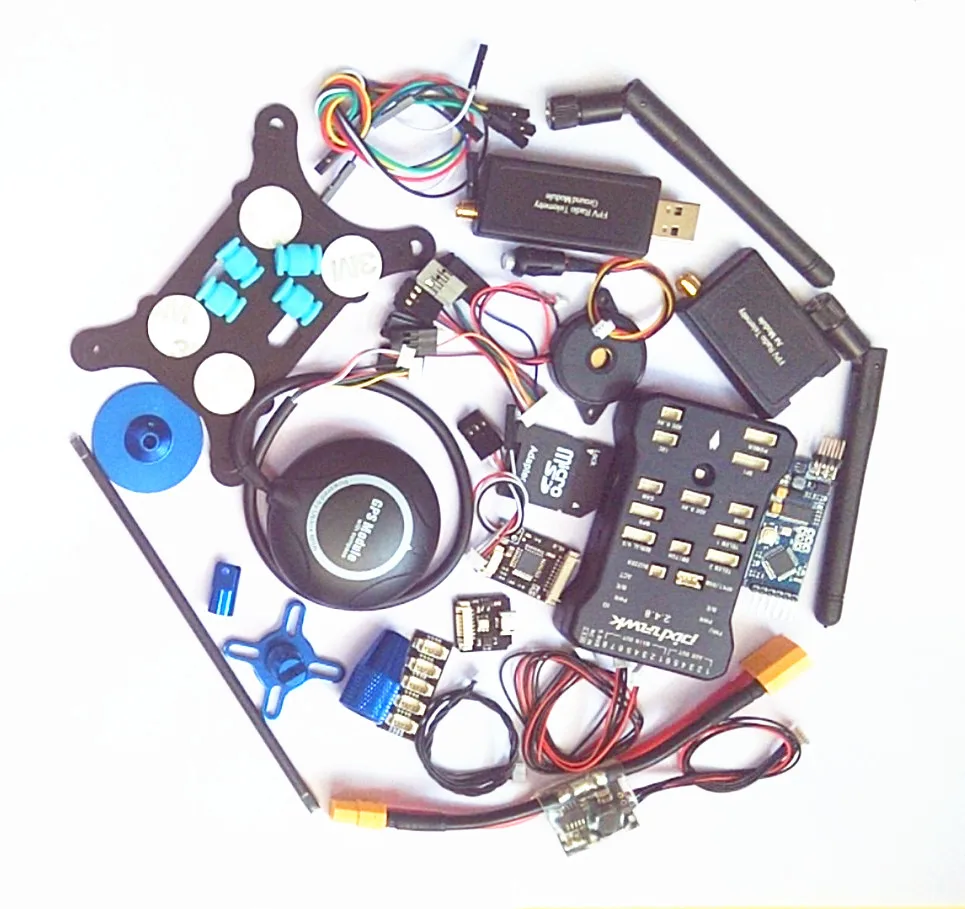
패키지 목록: (당신의 선택으로)
1 x Pixhawk 2.4.8 32bit ARM 비행 컨트롤러또는 Radiolink Pixhawk(당신의 선택으로)
1 x 충격 보드(당신의 선택으로)
1 x 안전 버튼(당신의 선택으로)
1 x 부저(다른 배치를 위해, 부저의 디자인은 다른, 무작위로 보낼 수 있습니다)
1 x XT60 전원 모듈(당신의 선택으로)
1 x I2C 스플리터 확장 모듈(당신의 선택으로)
GPS 홀더가있는 1 x M8N GPS(당신의 선택으로)
1 x GPS 홀더 (색상 랜덤)
1 x PPM 모듈(당신의 선택으로)
1 x 미니 OSD(당신의 선택으로)
1 x RGB 모듈(당신의 선택으로)
1x433Mhz 또는 915 Mhz3DR 무선 텔레 메 트리 키트 (케이블 포함)(당신의 선택으로)
참고:
당신이 컴퓨터와 연결하기 전에, SD 카드는 비행 관제사에 첫째로 삽입되고, 그 후에 펌웨어를 섬광하거나, 연결될 수 없다는 것을 확인하십시오, 또한 led 표시기가 켜지지 않습니다.
당신이 사용하기 전에 이러한 위키스와 비디오를 읽어보십시오.





















 배송기간
배송기간