RPLiDAR A1 A1M8 360 ° 무 지향성 2D 레이저 거리 Lidar 센서 모듈 스캐닝 스캐너 키트 12 M 범위 FZ3296
RPLIDAR A1 360도 레이저 스캐닝 레이더는 SLAMTEC에서 개발 한 저가의 2D 레이저 레이더 (LIDAR) 솔루션입니다. 2D 평면의 반경 12m (A1M8-R4 및 이전 모델은 6 미터 반경을 달성 할 수 있음) 내에서 360도 레이저 범위 스캔을 수행하고 공간의 평면 지점 구름 맵 정보를 생성 할 수 있습니다. 이러한 구름 맵 정보는 맵 매핑, 로봇 위치 탐색 및 객체 / 환경 모델링과 같은 실용적인 응용 프로그램에서 사용할 수 있습니다.
주당 1450 포인트의 샘플링 주기로 RPLIDAR 스캔 빈도는 5.5hz이며 최대 10hz가 될 수 있습니다.
RPLIDAR는 SLAMTEC에서 개발 한 저가의 레이저 삼각 측량 시스템을 사용하여 직사광선없이 옥외뿐만 아니라 다양한 실내 환경에서도 잘 작동합니다.
설명:
RPLIDAR A1 낮은 비용 360 학위 2D 레이저 스캐너 LIDAR) 솔루션 개발 SLAMTEC. 시스템 수행 360 학위 스캔 6 미터. 생성 된 2d 포인트 클라우드 데이터는 매핑, 현지화 및 개체/환경 모델링에서 사용할 수 있습니다.
RPLIDAR A1's 스캐닝 주파수 도달 5.5 hz 때 샘플링 360 포인트 각. 그리고 최대 10 hz 최대 구성 될 수 있습니다.
RPLIDAR A1 기본적으로 레이저 삼각 측정. 그것은 햇빛없이 온갖 실내 환경 및 옥외 환경에서 우수한 일할 수 있습니다.
특징:
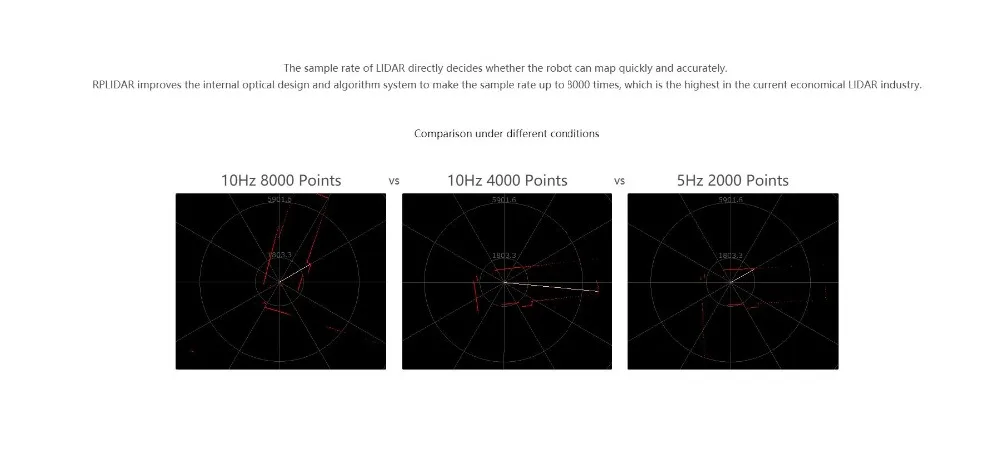
8000 배/s에 있는 거리 자료를 측정하십시오
360 학위 무 지향성 레이저 범위 스캐닝
8000 시간 표본 비율, 현재 경제적인 lidar 기업에서 가장 높은
Optmag 원래 디자인, 수명 연장
2-10 hz에서 구성 가능한 스캔 속도
로봇 탐색 및 현지화에 이상적
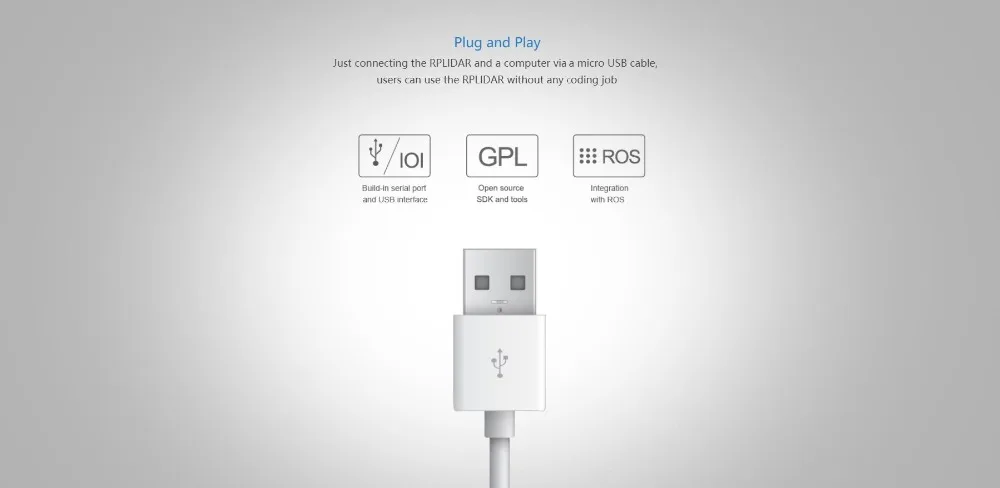
플러그 앤 플레이
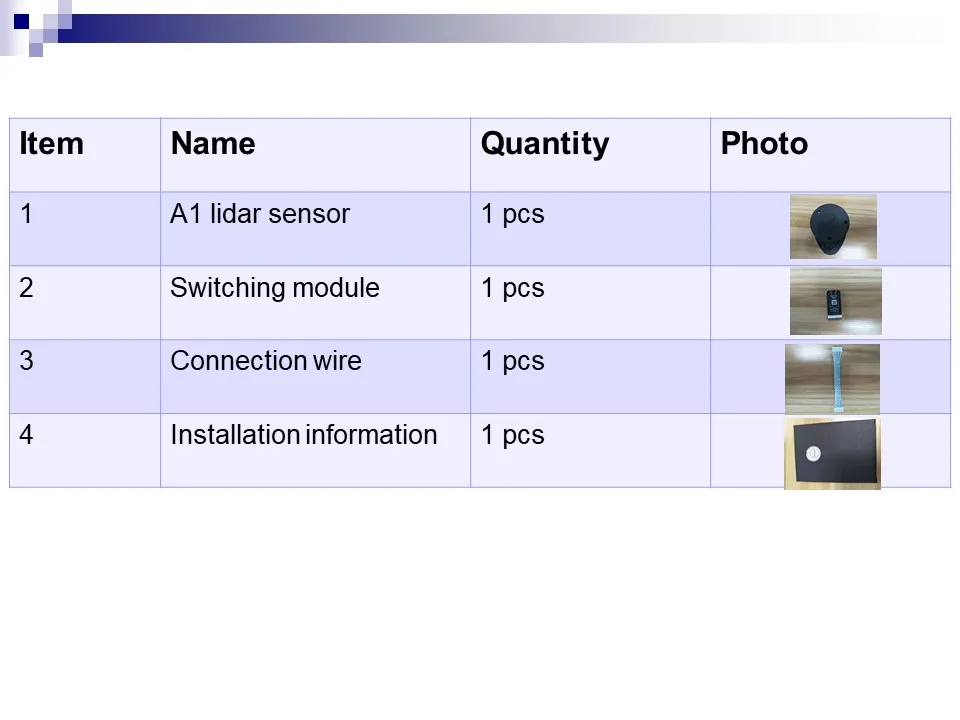
제품 표준 목록

제품 소개





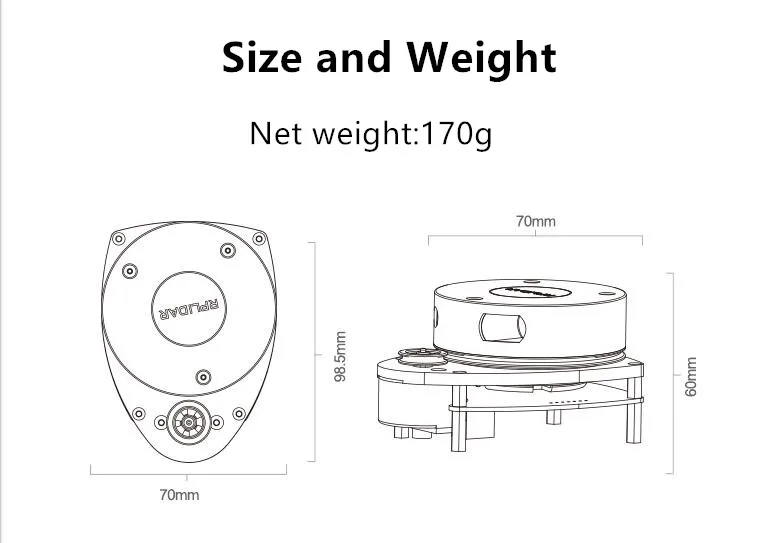
크기와 무게
기술 파라미터
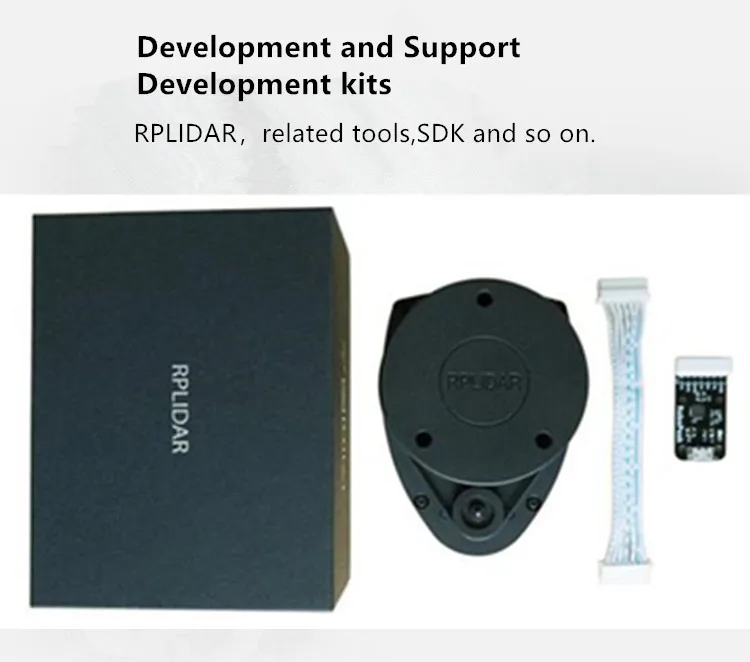
개발 및 지원
모든 문서

응용 시나리오:
집 서비스/청소 로봇 탐색 및 현지화
일반 로봇 탐색 및 현지화
스마트 장난감의 현지화와 장애물 회피
환경 스캐닝 및 3d 재 모델링
일반 동시 현지화 및 매핑 (슬램)
기술적 세부사항:
차원 98.5mm x 70mm x 60mm
무게 G.W 170g
배터리 제외
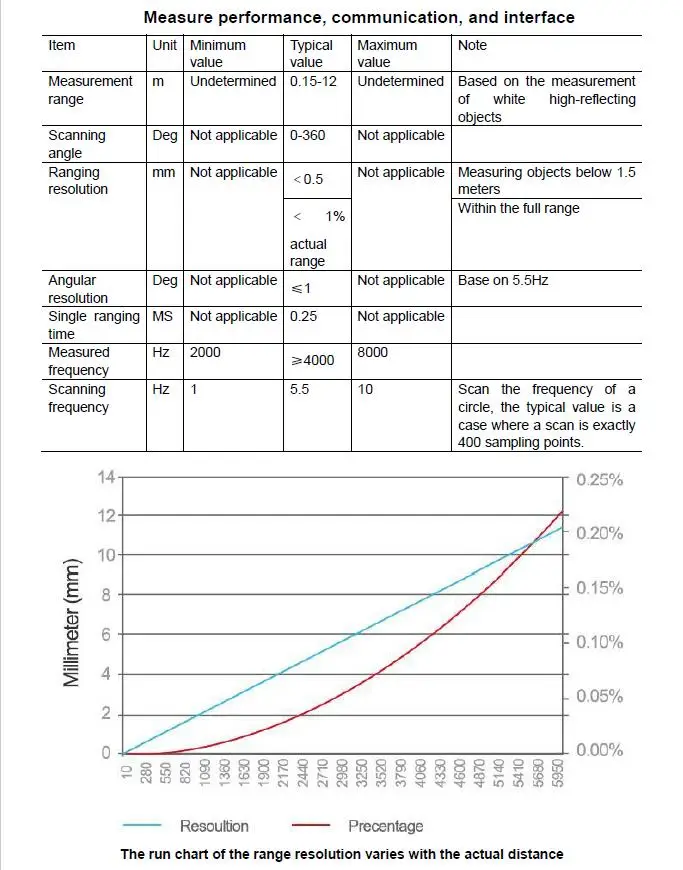
측정 성능
거리 범위 0.15-6 m, 흰색 개체
모난 범위 0-360 도
거리 해상도 <0.5mm
각도 해상도 ≤1Degree
샘플 기간 0.5 ms
샘플 주파수 2000 ~ 2010 hz
검사 비율 1 ~ 10 hz, 전형적인 5.5 hz
패키지 포함:
1 x rplidar a1 (pwm 모터 드라이버 임베디드)
1 X 어댑터
1 x rplidar a1 통신 케이블





















 배송기간
배송기간