|
|
     aHR0cDovL2ZyZWVzaGlwLmNvLmty aHR0cDovL2ZyZWVzaGlwLmNvLmty
- 전기이다: 리튬 배터리
- 브랜드 이름: YAHBOOM
- 추천 나이: 14 + y
- 원산지: 중국
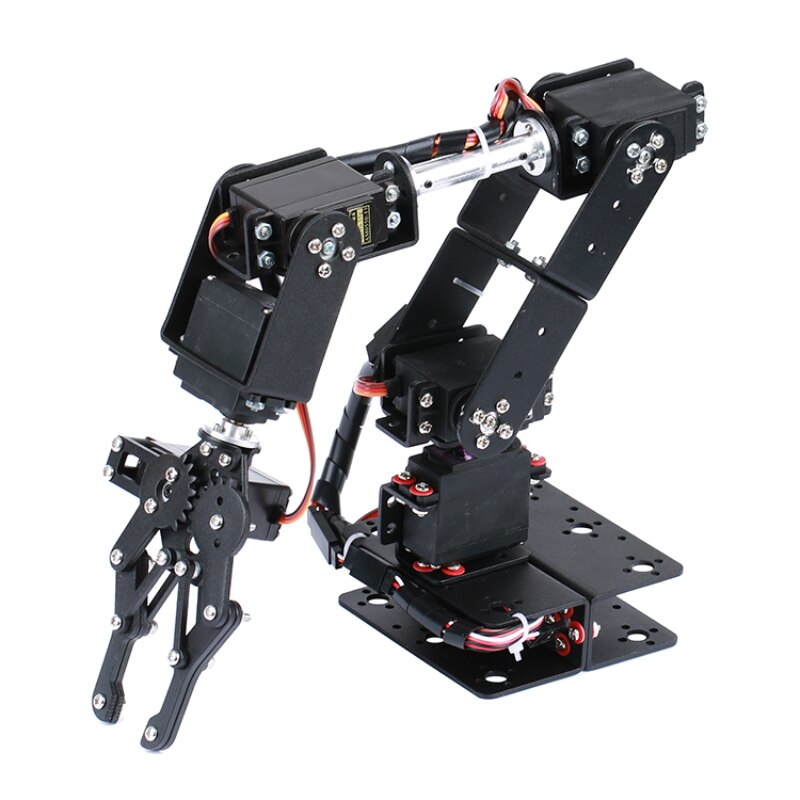
- Product name: ROSMASTER R2
- Main control board: Jetson NANO 4GB SUB,RaspberryPi 5 8GB,Jetson Orin NX,Jetson Orin NANO
- Operating system: Ubuntu 20.04 LIS+ROS2-Foxy
- Programming language: Python
- Remote control method 1: Mobile APP
- Remote control method 2: PC computer
- Remote control method 3: PS2 wireless handle
- Communication method: WIFI network (LAN/AP)
- Max speed: 1.8m/s
- Safety protection 1: Short circuit protection
- Safety protection 2: Over-current protection
- Material: Anodized aluminum alloy
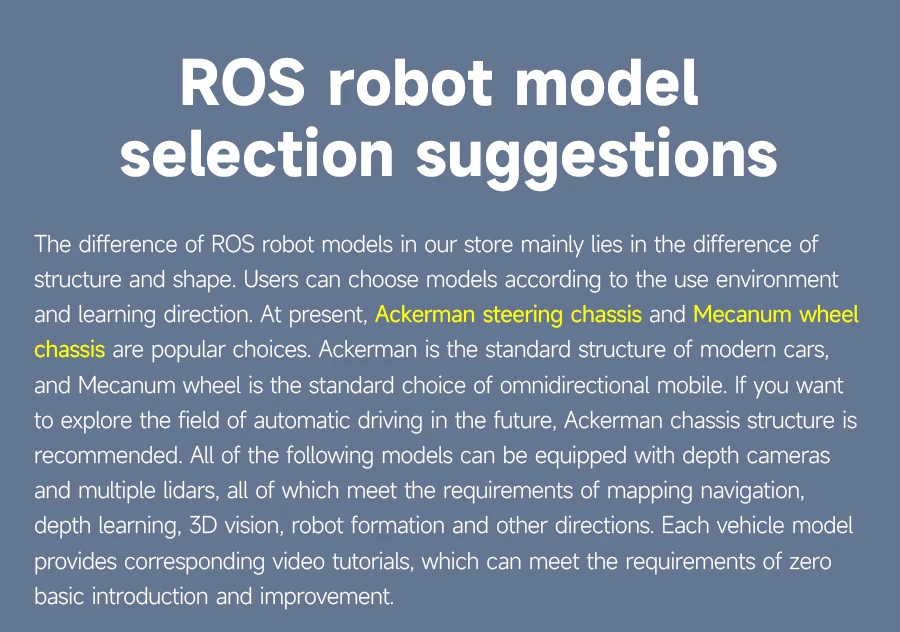
- Feature 1: Ackerman steering
- Feature 2: Smart Programmable
- Feature 3: Free Shipping
- Feature 4: ROS2 operating system
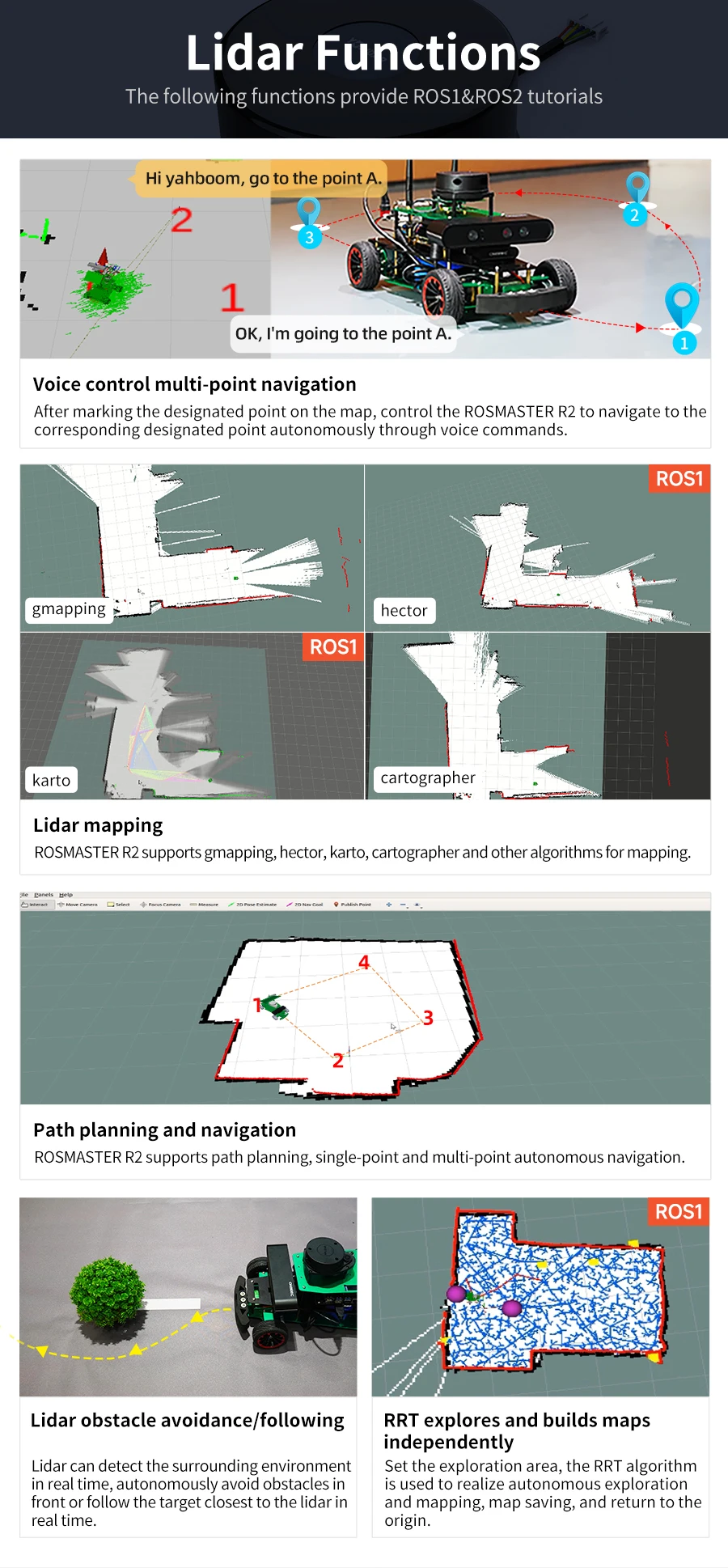
- Feature 5: SLAM mapping navigation
- Feature 6: Machine Vision Applications
- Feature 7: Voice interactive control
- Support: Robot formation
- Weight(assembled): 3200g-4600g
옵션정보[(200006151)Without Standard-RPi] [(200006152)With Standard-RPi] [(200006152)With Standard-RPi] [(200006153)Without Superior-RPi] [(200006153)Without Superior-RPi] [(200006154)With Superior-RPi] [(200006154)With Superior-RPi] [(200006155)Without Ultimate-RPi] [(200006155)Without Ultimate-RPi] [(200006156)With Ultimate-RPi] [(200006156)With Ultimate-RPi] [(200004889)Without Std NANO] [(200004889)Without Std NANO] [(200004870)With Std NANO SUB] [(200004870)With Std NANO SUB] [(200002984)Without Sup NANO] [(200002984)Without Sup NANO] [(200000195)With Sup NANOSUB] [(200000195)With Sup NANOSUB] [(100018786)Without Ult NANO] [(100018786)Without Ult NANO] [(100016350)With Ult NANO SUB] [(100016350)With Ult NANO SUB] [(691)WithSuperiorOrinNANO] [(691)WithSuperiorOrinNANO] [(1052)WithUltimateOrinNANO] [(1052)WithUltimateOrinNANO] [(1254)WithUltimateOrinNX] [(1254)WithUltimateOrinNX]
설명
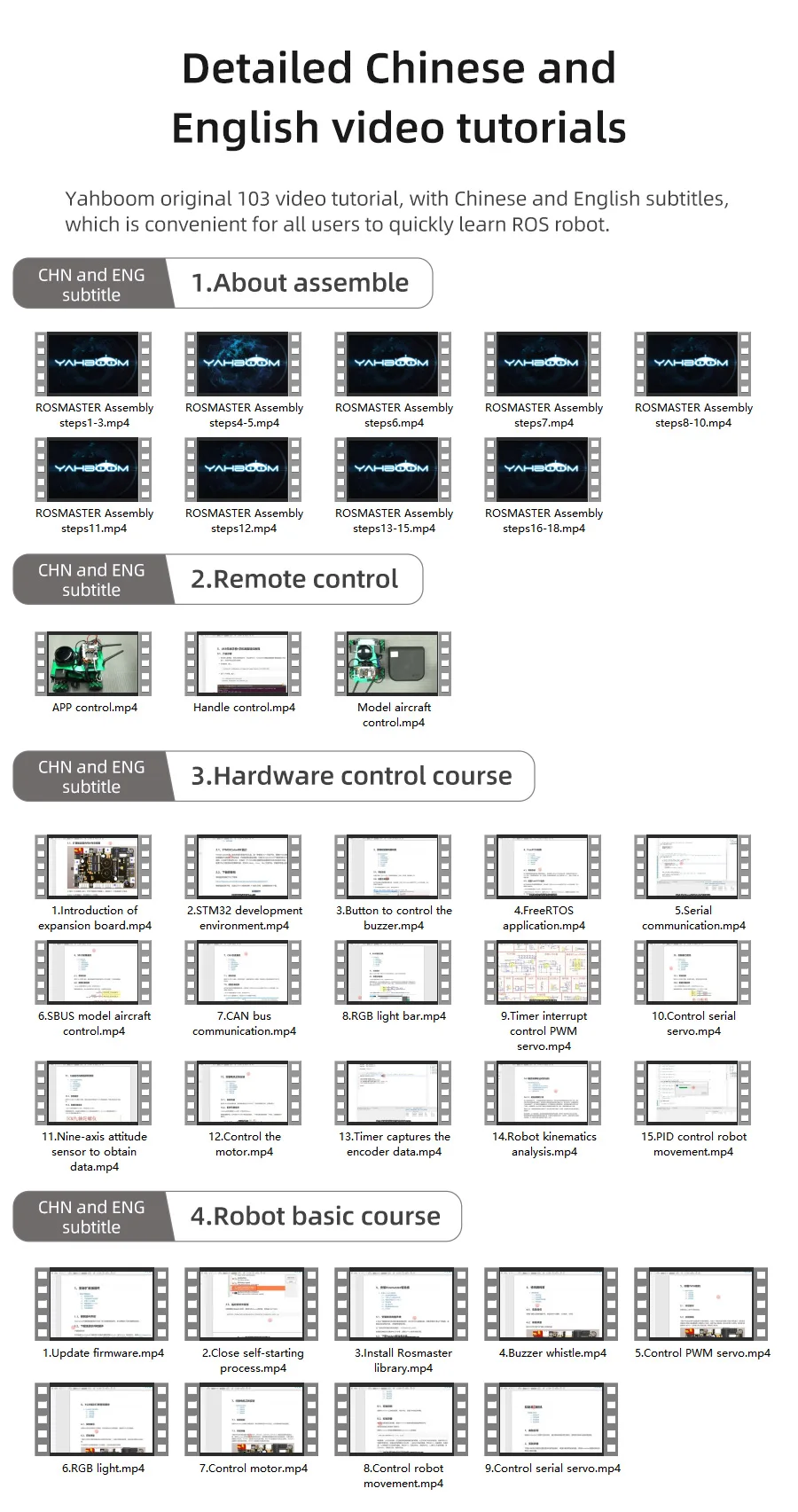
ROSMASTER R2 는 ROS2 시스템을 기반으로 개발 된 Ackerman 조향 구조를 갖춘 모바일 자동차입니다. 그것은 주요 제어 보드로 제트 슨 NANO(SUB/B01), 제트 슨 오린 NANO, 제트 슨 오린 NX 및 라즈베리 파이 5 를 지원합니다. R2 는 레이저 레이더, 깊이 카메라, 음성 상호 작용 모듈, 520 모터 레이싱 고무 타이어와 같은 고성능 하드웨어 구성을 갖추고 있으며 로봇 매핑 내비게이션, 장애물 회피, 자동 운전, 인간의 기능 동작 인식, 음성 상호 작용 제어 및 기타 기능. 또한 휴대 전화 APP, 무선 핸들, ROS2 운영 체제, 컴퓨터 키보드 및 기타 원격 제어 방법을 지원합니다. 그리고 우리는 105 수업 교육 비디오와 사용자의 참조를위한 많은 소스 코드를 제공 할 것입니다.
기능
【전문 Ackerman 조향 구조】
【전문 하드웨어 구성】
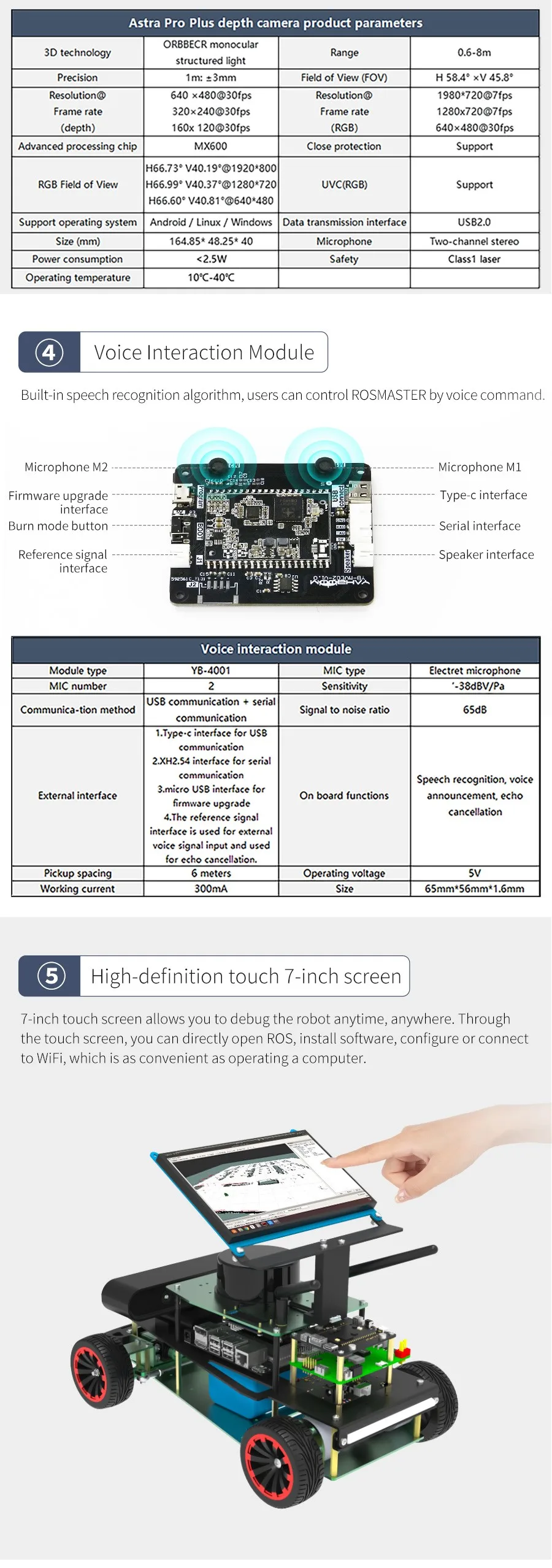
다기능 확장 보드는 Jetson NANO, Orin NX,Orin NANO 및 Raspberry Pi 5 의 4 개의 보드와 호환됩니다. Lidar (SLAM A1/YDLIDAR 4ROS), 깊이 카메라, 음성 상호 작용 모듈 및 7 인치 디스플레이 화면과 같은 다양한 액세서리를 사용자가 선택할 수 있습니다.
【(ROS2) 로봇 운영 체제 기반】
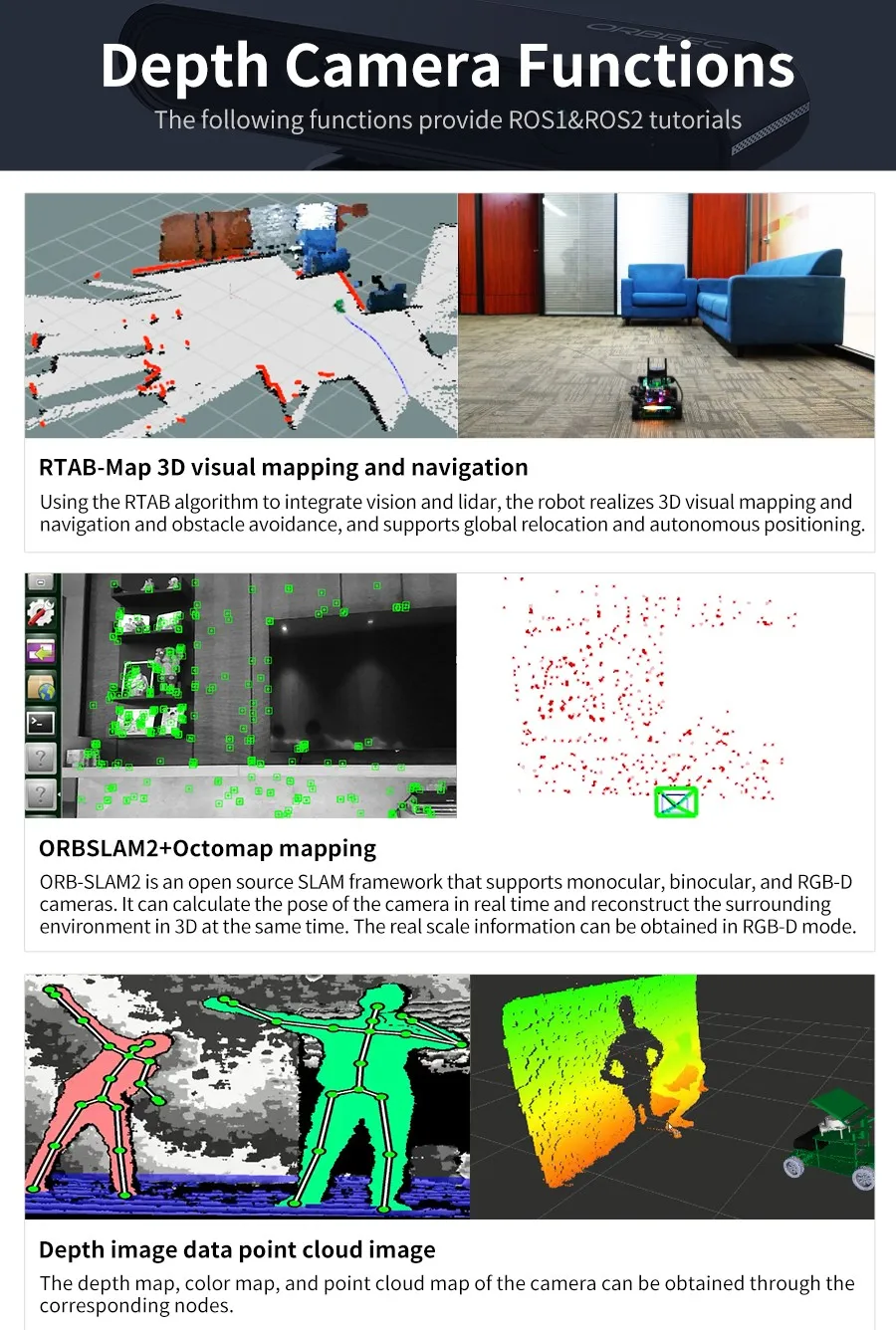
파이썬 프로그래밍. MediaPipe 개발 프레임 워크는 손 및 얼굴 감지, 3D 감지 및 인식 기능을 완료하는 데 사용됩니다. 깊이 이미지 데이터와 포인트 클라우드 이미지를 쉽게 얻을 수 있으며, 깊이 학습을 완료하고 알고리즘을 사용하여 일부 AI 기능을 수행 할 수 있습니다.
【다중 기능 및 원격 제어 방법】
R2 로봇은 3D 시각적 매핑 탐색, 레이더 장애물 회피, 시각적 인식, 표적 추적, 음성 인식 상호 작용, 자동 조종 장치 및 기타 기능을 실현할 수 있습니다. 휴대 전화 APP, 무선 핸들, ROS 운영 체제, 컴퓨터 키보드, jupyterLab 웹 페이지 프로그래밍 제어를 지원합니다. 로봇 편성, 멀티 로봇 항법, 동기 원격 제어 및 동기화된 대기열 성능 등을 지원합니다.
포장 목록

세부 사항
|
|
|
|
|
















 배송기간
배송기간